
赋予各类终端智能的立体感知能力
为各类智能终端提供精准而稳定的6DOF空间感知能力,让用户免去复杂而耗时耗力的感知算法开发
基于多源融合感知+空间计算,系统实时输出、深度图、6FOF位置与姿态等空间感知信息
帮助各类终端实现自主定位、导航、避障、建图等功能
/
建图
在运动中扫描与感知周边环境。将多传感器提供的图像信息、深度信息及惯性信息融合,建立3维半稠密点云地图,构建起周围环境的基本轮廓。
定位
融合多传感器数据高速计算设备在建图环境中的实时3维位置。结合回环检测功能,来减少运行中的累计误差。
避障
通过双目深度图,可精确感知前方障碍,为避障算法提供准确的数据。
导航
提供路径规划例程。结合实时定位与建图数据,可实现机器人自主导航算法的快速开发。
建图
定位
避障
导航
极致性能表现
通过在多个不同的真实业务场景中进行实操训练,系统持续优化选代
性能指标均处于业内领先水平,轻松应对各类挑战,为创新与探索而生
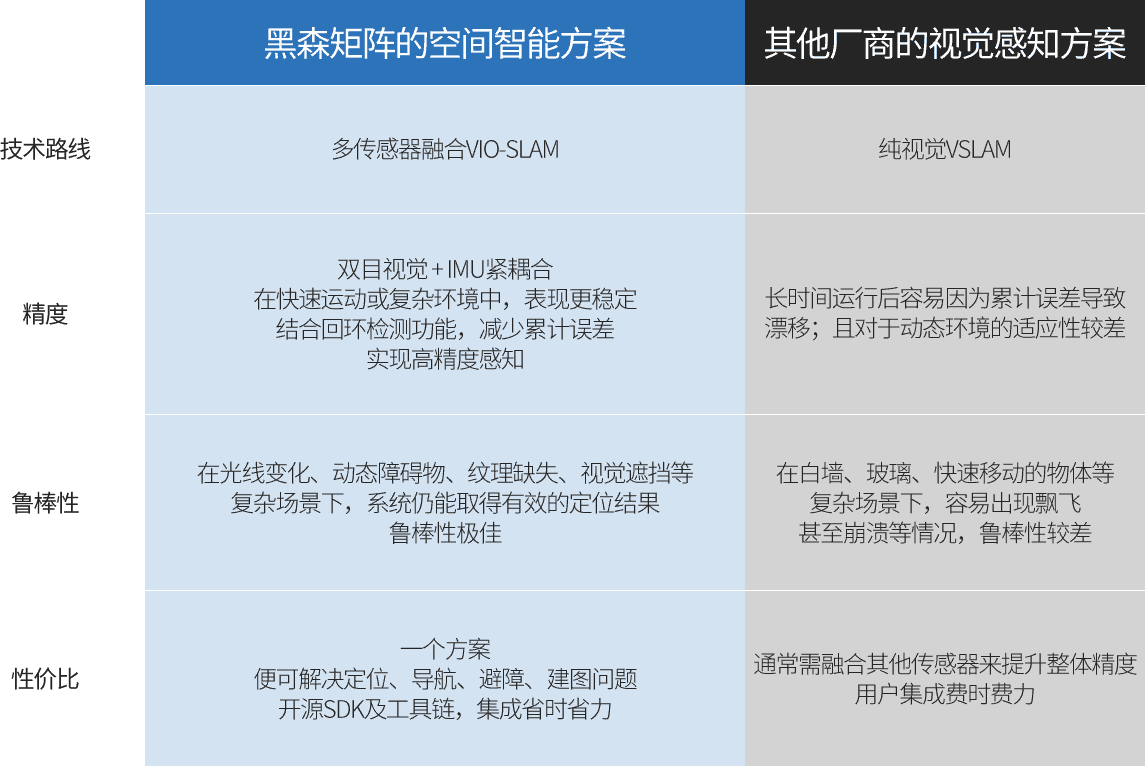
精度 Accuracy
双目视觉+IMU紧耦合
实时输出精确三维数据(深度图、位姿等)
鲁棒性 Robustness
VIO
稳健的VIO系统,无惧环境干扰
适应各种极端情况(强光、弱纹
理、纹理重复、抖动、撞击等)
全面保障机器人作业精度
性能跑分 Performance
STEREO3
极致性能表现
强抗震 \ 低时延 \ 高帧率 \ 高精度
播放视频
户外大场景实测精度极高
播放视频
空间智能触手可及
系统开放SDK,全开源工具链,帮助用户快速开发部署
为各行业应用提供更具性价比的空间感知方案
丰富传输接口
RJ45、USB2.0/3.0、Type-C
CAN、I2C、UART、EMMC
SDK开放
开放root权限,和Ubuntu20.04运行环境
用户可自行编译SLAM算法与规划算法
开源工具链
支持系统:windows/linux传输
协议:TCP/ROS1/ROS2
